Зачем в приводе энкодер и оптическая линейка. Важные критерии при выборе энкодера. Преимущества магнитных энкодеров
Функциональные возможности, конструктивные особенности, применяемые материалы и технологии изготовления абсолютных оптических и магнитных энкодеров вращения производства. Энкодер вращения — оптический или магнитный? Перевод публикации интервью в журнале «Конструктор» с соучредителем группы компаний Fraba на тему магнитной технологии.
На что обращать внимание при выборе энкодера?
Надежность энкодера — это очень важно!
От надежности работы энкодера зависит надежность и качество работы как вашего комплексного оборудования, так и производства в целом. Так, потери от непредвиденных остановок производственной линии могут оказаться несоизмеримо высокими по отношению к сэкономленным на приобретении энкодеров средствам. Сюда входят потери рабочего времени персонала, повреждение производственного материала и оборудования, затраты на диагностику/поиск неисправности, ремонт/замену вышедшего из строя энкодера и последующую юстировку и испытание/запуск оборудования.
При подборе энкодера также важно обращать внимание на его технические характеристики. Некоторые производители заявляют о высоком разрешении, однако очень часто подразумевается не физическое, а интерполированное разрешение. Разумеется, точности и допустимой нелинейности от таких энкодеров ожидать не приходится и, в ряде случаев, значения этих характеристик недостаточны для работы энкодера в составе прецизионного оборудования. При подборе энкодера очень важно сделать выбор в пользу проверенного качества.
Учитывая вышеперечисленное, мы настоятельно рекомендуем серьезно подходить к подбору энкодера. Бесперебойная работа оборудования в течение длительного времени и имидж Вашей компании только в Ваших руках!
Представленные в нашей программе поставок абсолютные оптические и магнитные энкодеры вращения разрабатываются и производятся компанией Posital Fraba, которая является
мировым лидером в производстве сенсоров позиционирования и первооткрывателем метода абсолютного позиционирования угла поворота. Продукция немецкого производителя Posital Fraba отличается высшим качеством, гарантией которого явился многолетний (более 80-лет!) опыт производства абсолютных энкодеров. Для задач позиционирования − от автоматизации на производстве до мобильной техники − необходима точная и актуальная информация о положении того или иного механического узла.
Абсолютные энкодеры регистрируют малейшие перемещения и преобразуют их в цифровой сигнал. Способность абсолютных энкодеров точно и быстро регистрировать угловое и линейное перемещение делает их важнейшим связующим звеном между механикой и системой управления. В ассортименте Posital широкий спектр механических исполнений энкодеров со всеми распространенными видами интерфейсов.
Материалы, технологии и опыт производителя
Высокие требования к применяемым материалам с учетом разных коэффициентов температурного расширения, применение подшипников проверенных поставщиков, специальные технологии выборки люфтов — это все влияет на такие важные параметры энкодера, как плавность и легкость вращения вала, долговечность и стабильность механических параметров. Еще в 1970 году ФРАБА разрабатывает первый в мире опто-электронный датчик углового положения и начинает его производство. Большой опыт работы и современные технологии производства делают продукцию этой компании непревзойденной по таким важным параметрам как: высокая надежность, низкие цены и кратчайшие сроки поставок. С годами у производителя, особенно у производителя концентрирующегося на производстве узкой линейки продукции, в данном случае производстве абсолютных энкодеров, за плечами оказываются колоссальный опыт, свои наработки и секреты.
Ниже представлены технологии лежащие в основе абсолютных энкодеров производства Posital Fraba, их отличия и особенности.
Оптические энкодеры
Современный абсолютный оптический энкодер является чрезвычайно сложным устройством. При разработке оптического энкодера с высоким разрешением разработчики сталкиваются с большим количеством противоречащих друг-другу факторов, сильно влияющих на точность и надежность работы энкодера в течение длительного времени.
Принцип оптического измерения
Ключевым компонентом оптических энкодеров является установленный на валу кодовый диск. Этот диск изготовлен из прозрачного материала, имеющего концентрический рисунок из прозрачных и непрозрачных участков. Инфракрасный свет от светодиода попадает через кодовый диск на ряд фоторецепторов. По мере поворота вала уникальная комбинация фоторецепторов освещается светом, прошедшим сквозь рисунок на диске. Для многооборотных моделей существует дополнительный набор кодовых дисков, установленных в зубчатом механизме. По мере поворота главного вала датчика эти диски, находящиеся в зацеплении друг с другом, вращаются наподобие механизма счетчика километража. Положение вращения каждого диска контролируется оптически, а выход представляет собой информацию о количестве оборотов вала энкодера.
Функциональные возможности
Оптические абсолютные энкодеры IXARC POSITAL используют высокоинтегрированную технологию Opto-ASIC, обеспечивающую разрешение до 16 бит (65536 шагов) за оборот. Для многооборотных моделей диапазон измерения увеличивается за счет механически зацепляемых кодовых дисков до 16384 (214) оборотов.
Преимущества оптических энкодеров
Оптические энкодеры обеспечивают очень высокое разрешение и точность, а также превосходные динамические характеристики, и подходят для использования в зонах с интенсивными магнитными полями. Поскольку вращение кодовых дисков представляет собой полностью механический процесс, эти устройства не могут потерять информацию об абсолютном положении в случае временного отключения питания прибора. Резервные батареи не требуются!
Конструкция энкодера
Основной проблематикой является наличие в одной конструкции большого количества механических, оптических и электронных взаимодействующих, но совершенно разных по природе компонентов. Так, механика имеет склонность к механическому износу. А на качество оптических элементов влияют в первую очередь такие факторы, как загрязнение, тускнение, изменение интенсивности излучения. Высокое разрешение энкодера требует использования оптического диска с высокой плотностью нанесенного на него трафарета. Для оптического/физического разрешения (а не интерполированного!) в 12 бит требуется диск с секторами делящими окружность на 4096 частей/меток. Чем компактнее энкодер и меньше диаметр диска, тем выше требования к оптике энкодера. Для распознавания такой плотности рисунка на диске необходимо располагать считывающую матрицу в непосредственной близости к диску. Минимальный зазор между вращающимся диском и считывающей матрицей предъявляет очень высокие требования к механике. Минимальное биение/люфт вала приведет к соприкасанию при вращении диска с считывающей матрицей и, как следствие, к повреждению нанесенного на диск трафарета. Износ механических частей энкодера или негерметичность корпуса ведет также к загрязнению оптики продуктами износа и попадающей снаружи пыли и, как следствие, искажению результатов измерения. Оптический диск является важным узлом энкодера. Под воздействием времени, перепадов температуры и мн. др. факторов свойства материала диска могут со временем меняться, например тускнеть и деформироваться. Первый фактор, в сочетании с теряющим интенсивность светодиодной подсветки, резко может снизить надежность работы и/или вызвать полный отказ в работе. Второй фактор может вызвать опасность соприкасания диска с матрицей при вращении вала энкодера с теми же вытекающими последствиями.
Магнитные энкодеры
Принцип магнитных измерений
Магнитные энкодеры определяют угловое положение с использованием магнитно-полевой технологии. Постоянный магнит,установленный на валу энкодера, создает магнитное поле, которое измеряется датчиком, формирующим уникальное значение абсолютного положения.
Инновационная многооборотная технология
Многооборотные магнитные энкодеры IXARC POSITAL используют инновационную технологию для отслеживания количества оборотов, даже если оборот произошел при отключенном питании системы. Для выполнения этой задачи энкодеры преобразуют вращение вала в электрическую энергию. Технология основана на эффекте Виганда: когда постоянный магнит на валу энкодера поворачивается на определенный угол, магнитная полярность в „проводе Виганда“ резко меняется, создавая кратковременный всплеск напряжения в обмотке, окружающей провод. Этот импульс отмечает поворот вала, а также обеспечивает питание электронной цепи, регистрирующей данное событие. Эффект Виганда происходит в любых условиях, даже при очень медленном вращении, и исключает потребность в резервных батареях.
Преимущества магнитных энкодеров
Магнитные энкодеры являются надежными, долговечными и компактными. Конструкция, не требующая использования батарей и не имеющая зубчатых передач, обеспечивает механическую простоту и более низкую стоимость по сравнению с оптическими энкодерами. Их компактные габариты позволяют использовать их в очень ограниченном пространстве.
Энкодер вращения — оптический или магнитный?
Этот вопрос однажды задали соучредителю группы компаний «Fraba» (он же директор компании Posital) в интервью журнала «Конструктор» при обсуждении темы внедрения новой магнитной технологии при производстве энкодеров вращения.
Ниже перевод публикации этого интервью.
Что говорят специалисты в отношении новой магнитной технологии?
Перевод публикации интервью с соучредителем группы компаний «Fraba» по теме внедрения новой магнитной технологии при производстве энкодеров вращения
Энкодеры вращения преобразуют угол поворота вала в электрический сигнал и работают на оптическом или магнитном принципе действия. Оптические энкодеры измеряют точнее, а магнитные по конструкции более стабильные и прочные — таково распространенное мнение. Соответствует ли это действительности на самом деле? Редакция журнала „Конструктор“ взяла интервью у соучредителя группы компаний «Fraba» и компании-производителя «Posital» с 50-и летним стажем разработки и производства абсолютных энкодеров из г. Кёльна.
Господин Лезер, являются ли на самом деле оптические энкодеры точнее магнитных?
Однозначно нет. В настоящее время оптические энкодеры больше не опережают магнитные по точности. Технология магнитных энкодеров в последние годы позволила полностью перекрыть разрыв с оптической в отношении всех важных электрических параметров. Выпускаемые сегодня магнитные энкодеры уже достигают разрешения 16 бит при точности 0,09° и, таким образом, такие параметры, которые раньше были достижимы только оптическими энкодерами. Касательно оптических энкодеров мы говорим с позиции производителя абсолютных оптических энкодеров с 50 летним опытом работы. Оптические энкодеры мы производим начиная с 1963 года и это всегда являлось нашей основной специализацией. В 2013 году произошел настоящий переворот в соотношении технологий, когда был представлен магнитный энкодер достигающий по всем ключевым параметрам традиционные оптические системы.
Что позволило так значительно повысить возможности магнитных энкодеров?
Залогом успеха явился технологически качественный скачок, в котором важную роль сыграла удачная комбинация аппаратной и программной части магнитной системы.
Магнитные энкодеры нового поколения базируются на датчиках Холла, аналоговые сигналы которых обрабатываются быстрым 32-битным микроконтроллером в режиме реального времени. Сложные программные алгоритмы, разработанные специально для новых хай-тек чипов нашими IT-специалистами, обеспечивают прецизионную калибровку и гарантируют высочайшую точность новой серии магнитных энкодеров.
А в технологии оптических энкодеров имеется также прогресс в дальнейшем развитии, например, в отношении чувствительности к влажности, загрязнению, к ударным нагрузкам и вибрациям?
Также и здесь есть дальнейшее развитие, однако без значительных скачков достигаемых результатов. Принципиально эта технология применяется в таком виде, как она существовала 50 лет назад. Сегодняшние оптические энкодеры меньше в размерах, имеют большее разрешение и частично механически прочнее и стабильнее прошлого поколения энкодеров. Однако в основе лежащая проблематика в отношении чувствительности к влажности, загрязнению и механическим воздействиям остаются и сегодня. Оптические системы по своей природе чувствительны ко всему, что может препятствовать надежной передаче сигнала от источника света на пути к чувствительным фото-рецепторам. В этом отношении магнитные энкодеры всегда были впереди. Будь то пыль, туман или сильная тряска — ничто не в состоянии так быстро нарушить работоспособность магнитного энкодера.
И все таки, имеются ли случаи применения, где оптические энкодеры предпочтительнее магнитных, например, в отношении устойчивости к магнитным полям?
Помехоустойчивость магнитных энкодеров у нас под надежным контролем благодаря специальным механизмам экранирования от магнитных полей. Даже в непосредственной близости от таких сильных источников помех, как электронного тормоза электродвигателя, наши магнитные энкодеры работают без проблем. Таким образом также и в вопросе магнитной устойчивости оптические энкодеры уже не имеют никаких преимуществ. Мы рассматриваем оптические энкодеры лишь в качестве дорогого решения для задач, где необходимо экстремально высокое разрешение, скажем, в 20 бит в обороте. В большинстве же случаев точность магнитных энкодеров предостаточна.
Какая технология энкодеров дает больше свободы машиностроителям в проектировании?
Магнитные энкодеры предлагают ощутимо больше возможностей и свободы в проектировании. Они значительно компактнее и легче оптических, которые в многооборотных моделях значительно массивнее магнитных за счет наличия в конструкции достаточно габаритного редуктора состоящего из нескольких оптических дисков. Магнитные энкодеры благодаря своей компактности позволяют их встраивать в очень ограниченные пространства машины или другого оборудования. Ну и очередной не малозначимый положительный фактор — более бюджетная цена. Одним словом совсем не удивительно, что магнитные энкодеры являются сейчас основным трендом и это признает большинство наших конкурентов.
Сопутствующие товары и статьи

Слово «энкодер» имеет англоязычное происхождение. Оно возникло от слова encode, что значит «преобразовывать». Наиболее известными мировыми производителями данных приборов являются такие известные бренды как Siemens, СКБ ИС, HEIDENHAIN RLS, Baumer, SICK AG, Balluff, Schneider electric (Autonics Telemecanique), OMRON.
Сфера и цель применения
Энкодер - это датчик, применяемый в промышленной области с целью преобразования подконтрольной величины в электрический сигнал. При помощи него определяется, например, положение вала электрического двигателя. В связи с тем что каждое устройство, в котором применяется вращение, обязательно должно быть оснащено прибором, контролирующим точность вращательного момента, популярными сферами использования подобных преобразователей являются системы точного перемещения. Основная цель, с которой применяется энкодер, - это измерение угла поворота объекта во время вращения. Энкодеры незаменимы в процессе производства на станкостроительных предприятиях, в работотехнических комплексах. Используют их также во многих современных которые нуждаются в регистрации высокоточных измерений углов, вращения, поворотов и наклонов.

Ранжирование энкодеров
Все ныне известные энкодеры подразделяются на абсолютные и инкрементальные, резисторные, магнитные и оптические, работающие через промышленные сети либо шинный интерфейс.
В зависимости от общего принципа работы выделяют абсолютные энкодеры и инкрементальные. Различие между этими двумя видами заключается в выполняемых ними задачах. Перечень задач абсолютного энкодера гораздо шире перечня, который охватывается энкодером инкрементальным.
Инкрементальные энкодеры
Это В процессе поворота объекта на его выходах фиксируются импульсы, количество которых прямо пропорционально углу вращения предмета. Обычно инкрементальные преобразователи применяют в процессе станкостроения с целью регистрации углового перемещения вала или в автоматизированных системах в цепи обратной связи для измерения и регистрации скорости поворота вала.

Инкрементальный энкодер - это устройство, функционирующее на основе данных импульсов, образующихся при вращении. Количество импульсов на единицу оборота - это и есть основной рабочий параметр данного устройства. Текущее значение определяется датчиком по методу подсчета количества импульсов от точки отсчета. С целью привязки систем отсчета на импульсном энкодере устанавливаются референтные метки, которые являются стартовыми после включения оборудования. Определение данных при помощи инкрементального преобразователя возможно лишь во время вращения или поворота. При остановке вращения все данные энкодера обнуляются. В итоге при последующем включении предыдущие данные счетчика будут неизвестны. Для удобства его эксплуатации следует привести вал в исходное положение. Инкрементальный энкодер идеально справляется с задачей поворота. При помощи подсчета количества импульсов от референтной метки можно с точностью определить также текущую координату угла вращения объекта.
Абсолютные энкодеры
Так называют абсолютный Обычно в подобных энкодерах наблюдаются более сложные процессы электронной обработки сигналов и имеется оптическая схема. Но зато они выдают реквизиты объекта сразу после включения, что зачастую является обязательным для корректного функционирования системы в целом. По сравнению с инкрементальными использование абсолютных энкодеров позволяет решать значительно более широкий круг задач, так как измерения производятся не при помощи фиксации импульсов, а специальными цифровыми кодами. Единица измерения подобного аппарата - это число уникальных цифровых кодов за единицу вращения (1 оборот).

В связи с тем, что все цифровые коды, выдаваемые датчиком, уникальны, определить текущую координату линейного перемещения сразу же после включения прибора не составляет труда и без использования реферетной метки. В момент включения на выходах датчика появляется код из цифр. Он и является обозначением текущего положения угла поворота объекта. Таким образом, абсолютный энкодер отлично справляется не только с задачей отслеживания скорости поворота (вращения) объекта, но и выдает корректные данные о его точном расположении в данный момент времени, независимо от того, подключен он или нет.
Разновидности абсолютных энкодеров
В зависимости от особенностей характеристик аюсолютные энкодеры могут различаться типом крепления, наличием несквозного или сквозного, полого или выступающего вала. Ассортимент таких устройств также очень разнообразен с точки зрения внешних характеристик: длины, диаметра корпуса и так далее. Кроме того, известно, что абсолютные положений во время вращения бывают многооборотными и однооборотными. Однооборотные производят определение текущей координаты в пределах 1 оборота, а многооборотные способны к распознанию еще нескольких дополнительных оборотов.
Оптический энкодер - что это?
Данный преобразователь представляет собой жестко закрепленный на валу диск, сделанный из стекла. Энкодер оптический, в отличие от вышеописанных датчиков, дополнительно оборудован оптическим растором, который в процессе поворота вала перемещается и преобразовывает вращательный момент в поток света, принимаемый впоследствии фотодатчиком.

Данный тип преобразователя фиксирует углы вращения, где каждому уникальному положению соответствует специальный неповторимый код из цифр. Он вместе с количеством оборотов и представляет собой единицу измерения датчика. Подключение энкодера и принцип его действия идентичны функционированию инкрементального устройства, описанного выше.
Типы датчиков в зависимости от принципа работы
По характеристикам работы энкодеры делятся на магнитные и фотоэлектрические.
Физический принцип работы первых базируется на применении открытого в 1879 году Э. Холлом. В данном случае разность потенциалов возникает лишь при помещении проводника постоянного тока в область магнитного поля.
По характеристикам разрешения и точности магнитный энкодер уступает фотоэлектрическому, но его реализация проще. Он является гораздо менее требовательным к пространствам и условиям функционирования.
Представитель магнитного энкодера представляет собой прибор, фиксирующий цикл прохождения магнитного полюса вращающегося магнита, расположенного поблизости от чувствительного элемента. Выражение данных передатчика также имеет вид цифрового кода.
Фотоэлектрический энкодер - это датчик, функционирующий на базе фотоэлектрического эффекта, который наблюдается в результате воздействия света на вещество. Открыт данный принцип в 1887 году Г. Герцем. В процессе работы датчика данного типа наблюдается постоянное преобразование светового луча в электрический сигнал.

Синонимом фотоэлектрического энкодера являются оптронный, оптический и оптоэлектронный. Датчики данного типа более требовательны к характеристикам производства, эксплуатации и многому другому, нежели иные энкодеры, но это оправдано, так как потенциал их точности значительно выше, нежели у конкурентов.
Что такое Энкодер.
Энкодер или датчик угла поворота – это электромеханическое устройство, предназначенное для преобразования углового положения вала или оси в электрические сигналы (рис 11.1). Существует два основных типа энкодеров - инкрементные и абсолютные.
Абсолютный энкодер
Диск абсолютного энкодера разбивается на некоторое количество секторов (чаще всего, но не всегда, это количество является степенью двойки). Сектора разбиваются на концентрические дорожки, каждая из которых представляет один бит кодированного номера сектора (рис. 11.2).
В данном примере абсолютный энкодер имеет 32 сектора. Соответственно, для их кодирования нужно log 2 (32) = 5 дорожек. Номера секторов обычно задаются кодом Грея . На каждую дорожку диска необходим отдельный датчик.
Код Грея
Обычное представление последовательности двоичных чисел не используется при построении абсолютных энкодеров из-за существенного недостатка.
Представим себе абсолютный энкодер, к примеру, 8-разрядный (угловой или линейный - не имеет значения). Он отслеживает перемещение по нарастанию координаты. Изменение его состояний приведено в таблице 11.1.
На середине шкалы, при переходе от значения 127 к 128, на выходе энкодера меняются одновременно все разряды. В идеальном случае все разряды меняются одновременно. В реальности же двух совершенно одинаковых датчиков не бывает, все они хоть немного отличаются друг от друга чувствительностью, быстродействием и т.д.; к этому добавляется неидеальность юстировки при расположении восьми датчиков в линейку. Это приведет к тому, что в процессе перехода от значения 127 (01111111) к 128 (10000000) мы ожидаем увидеть любое 8-разрядное двоичное число.
На рис 11.3 представлен пример такого изменения выхода при переключении состояния из 7Fh в 10h. Вместо перехода 7Fh → 10h можно наблюдать выходную последовательность: 7Fh → 7Bh → 75h → 71h → F1h → D1h → 90h →10h. Этот эффект может иметь крайне негативные последствия.

Предположим, что энкодер стоит в системе управления точным приводом. Контроллер, реализующий управление посредством петли обратной связи, сравнивает координату с датчика с желаемым положением инструмента и управляет сервомотором, перемещающим инструмент. Привод получает команду позиционирования в точку 128. Он успешно доезжает до 127 и на минимальной скорости, чтобы не проскочить по инерции, преодолевает последнюю ступеньку до 128.
В этот момент энкодер выдает какое-то случайное значение координаты; контроллер принимает его за истинную координату, вычисляет смещение относительно желаемой позиции и подает соответствующую команду сервомотору для сокращения этого смещения. Это "фантомное" смещение случайно и может быть любым в диапазоне от 0 до половины длины всей линейки (с учетом того, что мы уже находимся в середине; возьмем среднее значение в четверть линейки как наиболее вероятное).
Итак, не доехав до желаемого положения каких-то полшага, сервомотор делает мощный рывок и пытается утащить каретку куда-то в сторону на четверть линейки. По пути датчик получает правильные значения, вычисленное смещение резко уменьшается, и дальнейшее поведение привода полностью зависит от его динамики: тяжелая и медленная каретка просто не успеет разогнаться, легкая же и быстрая может начать осциллировать вокруг точки назначения.
Всех этих неприятностей можно легко избежать, если использовать для представления координаты код Грея . Основная его особенность состоит в том, что при увеличении или уменьшении величины на единицу код Грея для этой величины изменяется лишь в одном разряде. Как соотносится код Грея и двоичный код, показано в таблице 11.2.
Какую бы строку в таблице мы ни выбрали, при переходе на одну строчку вверх или вниз в коде Грея меняется лишь один разряд; следовательно, даже при наличии переходных процессов в датчике разница между двумя отсчетами не превысит одной единицы, что является вполне допустимым в промежуточной зоне.
Инкрементальный энкодер
Как следует из самого названия, инкрементальный энкодер определяет не абсолютное положение диска в пределах полного оборота, а относительное смещение от предыдущего положения. Для этого достаточно диска с единственной дорожкой (рис. 11.4).
 |
| Рис 11.4 |

Часто добавляют вторую дорожку с единственным делением на полный оборот. Эта дорожка позволяет выставить диск в начальное положение, относительно которого впоследствии будут производиться отсчеты. Она также может оказаться полезной в процессе диагностики энкодера, позволяя проконтролировать количество импульсов, выдаваемое датчиком за один оборот диска.
Подсчитывая количество импульсов от датчика, можно определить угол поворота диска относительно предыдущего положения; однако невозможно определить направление вращения диска. Для определения направления используется второй датчик, смещенный относительно первого на четверть шага (половину ширины штриха или промежутка между ними). По разности фаз сигналов датчиков определяется направление вращения диска.
Сравнение абсолютного и инкрементального энкодеров
Обе разновидности углового энкодера имеют свои достоинства и недостатки.
Абсолютный энкодер можно опрашивать в любой момент, когда потребуется узнать положение диска, а не обрабатывать перемещение на каждый шаг. Это упрощает работу с ним (в частности, делает тривиальным определение направления вращения диска), а также снижает требования к контроллеру, обрабатывающему данные о координатах (если контроллер потеряет несколько импульсов от датчиков, информация о текущем положении диска все равно будет доступна).
К недостаткам абсолютного энкодера в первую очередь следует отнести сложность изготовления, связанную с наличием большого числа датчиков (по одному на каждую дорожку диска, то есть на каждый разряд кода угловой координаты диска). Также в случае высокой точности энкодера (и, как следствие, большого количества разрядов данных) для подключения энкодера к контроллеру потребуется большое число линий связи и такое же число битов ввода (в случае параллельной передачи данных) либо затраты на дополнительное оборудование сериализации (в случае последовательной передачи).
В случае инкрементального энкодера достоинства и недостатки меняются местами по сравнению с абсолютным. Достоинствами являются: простота (всего два датчика вне зависимости от разрешения), относительная легкость при кустарном изготовлении, малое количество линий связи с контроллером. Недостатки: высокие требования к быстродействию контроллера (в случае потери импульсов от датчиков в данных о координате будет накапливаться ошибка), более высокая сложность обработки данных (из-за необходимости определения направления вращения диска).
Простейшая процедура обработки сигналов инкрементального энкодера.
Прежде чем приступить к рассмотрению процедур обработки сигналов декодера, выясним, что представляют собой эти сигналы.
Как уже говорилось ранее, декодер имеет два датчика: A и B. Датчики сдвинуты друг относительно друга на половину ширины штриха (или четверть шага диска), поэтому сигналы получаются сдвинуты по фазе на p/2. Примем для определенности, что сигнал B отстает от сигнала A при повороте диска против часовой стрелки:
Из рис. 11.5 видно, что при движении диска против часовой стрелки (состояния 0-1-2-3-4...) в момент перехода сигнала A из состояния 0 в 1 (передний фронт) сигнал B всегда находится в состоянии 0 (см. состояния 0, 4, 8). Если же диск движется по часовой стрелке (7-6-5-4-3...), сигнал B всегда находится в состоянии 1 (состояния 6, 2).
Отсюда вытекает простейшая процедура обработки сигналов декодера: по переднему фронту сигнала A проверить состояние сигнала B; если он равен 0, увеличить счетчик координаты на единицу, в противном случае уменьшить его на единицу.
Этот алгоритм вполне пригоден для применения в некритичных устройствах, когда погрешность определения координаты не приводит к фатальным последствиям: не так давно вытесненные оптическими роликовые мыши/трекболы, валкодеры магнитол и т. п. Однако он не годится для применений, в которых точность определения координаты является решающим фактором.
Причина несовершенства такой, казалось бы, простой и надежной процедуры кроется в том, что он требует сигналов идеальной формы. В реальных условиях датчики могут иметь «дребезг» при смене состояния сигнала (особенно это относится к датчикам с механическими контактами). В результате дребезга приращение координаты будет произведено несколько раз вместо одного, и значение координаты будет испорчено.
Но, даже если бы удалось избавиться от дребезга полностью, останется другая проблема. Предположим, что диск находится в положении между точками 3 и 4 на рис. 3 (назовем такую точку 3.5). При перемещении в точку 4.5 в точке 4 сигнал A переходит из 0 в 1, и согласно нашей процедуре координата диска увеличивается на единицу (поскольку сигнал B равен нулю на переднем фронте импульса A). Затем диск возвращается из 4.5 обратно в 3.5, но, поскольку при обратном движении диска в точке 4 сигнал A переходит из 1 в 0, наша процедура игнорирует это событие.
Итак, имеем: диск переместился на небольшой угол и вернулся в исходное положение, а координата увеличилась на единицу. Можно повторять такое перемещение произвольное число раз, и координата каждый раз будет увеличиваться. В итоге координата диска, измеренная посредством простейшей процедуры, не будет иметь ничего общего с истинным положением диска.
Проблема является достаточно актуальной, поскольку вероятность остановки диска на границе между светлой и темной зонами достаточно велика, а вибрации при работе промышленного оборудования в сочетании с возможным люфтом привода вполне могут привести к колебаниям диска, достаточным для смены состояния датчика. Это делает простейшую процедуру обработки сигналов по переднему фронту сигнала A непригодной для ответственных применений, где требуется максимальная точность измерения координаты диска.
Стоит отметить, что любой инкрементный энкодер имеет 2 типа состояний: устойчивое и не устойчивое. Устойчивые состояния энкодера расположены через один период сигнала А. Не устойчивые состояния – это все остальные. Из неустойчивых состояний энкодер легко переходит в устойчивое. Т.о. за точку отсчёта можно принимать только утойчивые состояния.
Рано или поздно в жизни каждого самоделкина возникает потребность в покупке чего-то такого этакого, что обычно само в голову не придет. Вот и я жил себе спокойно и об энкодерах даже не задумывался.
Хотя должен признаться опыт работы с энкодерами имел. Как-то в одной и поделок использовал энкодер из принтера.
В данной истории все приключилось внезапно. Ползая по своим хоббийным форумам натолкнулся на конкурс. Сайт (называть не буду, т.к. разговор не о нем) проводил видимо раскрутку посещаемости и плюс один из форумчан проводил раскрутку своих российского производства изделий. И разыгрывался комплект из 3 наборов для самостоятельной сборки сервоконтроллеров. Я зарегистрировался на этом форуме, подал заявку (вместе с 3 или 4-мя всего лишь участниками) и… выиграл.
Так я стал обладателем 3-х наборов для сборки сервоконтроллеров. Далее мне потребовались энкодеры. Позволю себе объяснить для читателей не так глубоко погруженных в электронные компоненты, что такое сервоконтроллер, энкодер и с чем все это едят.
Есть 2 основных способа управлять точным перемещением в изделиях с ЧПУ (числовое программное управление). Попробую объяснить максимально доступным языком, без сложных схем и терминов.
Первый способ это шаговые двигатели. Шаговый двигатель имеет сложное устройство - несколько катушек, притягивающих сердечник в заданных положениях.


Количество положений, в которых может быть зафиксирован сердечник называется шагами, промежуточные положения (регулируются различными промежуточными напряжениями и соответственно магнитными полями) называют микрошагами. Управляет шаговым двигателем драйвер - это плата управления, как правило с микропереключателями шагов и регулировкой тока, протекающего через двигатель. На вход драйвера подаются сигналы: Enable (разрешить работу шагового двигателя), DIR (направление вращения), STEP (количество шагов, на которое двигателю необходимо повернуть вал). И драйвер переводит команды в обороты вала двигателя. Очень простая и надежная конструкция. Из минусов - скорость вращения двигателя ограничена из-за его конструктива, и если двигатель пропустит по той или иной причине шаги, то управляющая программа об этом не узнает. Отсюда и область применения - низко и среднескоростные двигатели в заданной области нагрузок. Например 3Д принтер или хоббийные станки.
Второй способ управлять перемещениями - сервомотор. Мотор сам по себе может быть любым, постоянного или переменного тока, без разницы. Единственное условие, его вал должен иметь энкодер. Энкодер - это устройство определения позиции вала в данный момент времени. Об энкодерах мы поговорим подробнее чуть позже. Сервоконтроллер имеет другой принцип работы, в отличии от драйвера шагового двигателя. Сервоконтроллер получает на входе те же самые сигналы Enable, STEP, DIR и подает на двигатель напряжение. Двигатель начинает вращаться в нужном направлении, энкодер возвращает данные о положении вала двигателя. Как нужное положение достигается, вал двигателя в нем фиксируется. Конечно это сильно упрощено, т.к. есть ускорение и торможение двигателя, управление током и напряжением, пропорционально-интегрально-дифференцирующий (ПИД) регулятор в контуре обратной связи,… но мы же договорились в этот раз не сильно лезть в теорию.

Какие же плюсы серводвигателей: любая скорость вращения, отсутствие пропуска шагов, бесшумность (шаговый двигатель ощутимо громок в работе из-за своего конструктива). Но цена сервоконтроллеров выше и существенно драйверов шаговых двигателей. Поэтому основная ниша сервоконтроллеров - профессиональное применение.
Для своего проекта я выбрал двигатели Динамо Сливен. Эти двигатели широко использовались в советское время в ЭВМ и их было какое-то нереально большое количество. Кажется, что практически любой хоббийщик или имеет такой двигатель или сталкивался с ним. На барахолках их до сих пор перепродают. Это двигатели постоянного тока с фантастическим неубиваемым ресурсом и устойчивостью к любым издевательствам.

В качестве сервоконтроллера я использовал выигранную плату. Она представляет собой развитие open source сервоконтроллера, известного под устойчивым брендом «сервоконтроллер Чена» - по имени китайца, году так в 2004-м, если не ошибаюсь, предложившим данную схему.

Теперь уже практически переходим сути обзора - к энкодерам. Выбор энкодера был осуществлен по характеристикам и цене. Какие бывают типы энкодеров. В основном это оптические и магнитные. Магнитные - когда на краях диска закреплены магниты, а возле них находится датчик Холла.

Решение дорогое, промышленное, обладает повышенной надежностью. Цена не хоббийная ни разу.
Оптические энкодеры. Самое распространенное решение. Есть в каждой мышке. Раньше отвечали за вращение шарика и колесика. Теперь шариков уже нет, а вот колесики остались. Принцип работы прост - прерывание светового пучка проходящим непрозрачным телом.

Оптические энкодеры есть 2-х типов: инкрементальные и абсолютные. Инкрементальные делятся на 2 подтипа. Простейшие инкрементальные - такие как изображены на рисунке выше. Они определяют пересечение светового потока и на их основе можно построить, например, тахометр. Недостаток данного энкодера состоит в том, что при помощи него невозможно определить направление вращения диска. Инкрементальные 2-х канальные решают задачу определения направления вращения диска.

Для этого используется не один фотодиод, а несколько, обычно 4. Они формируют 2 независимых канала передачи данных, и сравнивая сигналы с этих каналов можно однозначно сделать вывод о направлении вращения диска.

Какие же недостатки есть у данного инкрементального энкодера? Недостаток один, но для ряда применений он критичный. При инициализации энкодера мы не знаем в каком положении находится диск. Т.е. мы можем узнать только направление и скорость вращения диска.
Для получения полной информации, а именно - начальное положение диска, направление и скорость вращения используются абсолютные энкодеры.


Абсолютные энкодеры используют диск со сложной системой кодировки положения. Наиболее распространен код Грея - двоичная кодировка с защитой от ошибок.
Я остановил свой выбор на инкрементальном энкодере с контролем направления вращения, т.е. с двумя квадратурными каналами вывода информации. Разрешения в 100 линий на оборот диска мне было за глаза. Поэтому на Алиэкспрессе я нашел энкодеры за разумную цену и с нужными мне характеристиками.
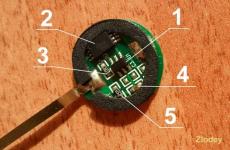
Вот фотка 3-х пришедших мне энкодеров. Дошли они недели за 3.

У энкодеров 4 вывода, Красный - питание 5В, Черный - земля, Цветные - каналы А и В.
Я быстренько выточил втулочку на вал двигателя под крепление диска, ввинтил туда стержень с резьбой.

На 3Д принтере распечатал площадку под крепление датчика энкодера

Собрал все вместе

Подключил сервоконтроллер, и… тут бы был счастливый конец обзору, но нет. Ничего не заработало. Даже близко ничего не заработало.
Подключил осциллограф и понял, что никаких квадратурных сигналов на выходе нет, только шумы, наводки и непонятные выплески. Грешил я на все на свете. И на требовательность к позиционированию, и на засветку, и на наводки электромагнитные. И часами аккуратно возюкал датчик в разных положениях, выключал свет и пытался проделать все тоже самое в темное. «Крокодил не ловится, не растет кокос.» Разумеется я перепробовал все 3 энкодера. Везде тоже самое. И тут меня дернуло поразглядывать датчик в микроскоп.

То что я увидел повергло меня в изумление. Все 4 сенсора стояли в ряд по радиусу диска, т.е. засвечивались через прорезь диска одновременно. Разумеется ничего не работало. Датчики должны стоять перпендикулярно радиусу диска, и засвечиваться последовательно разными фронтами прорези диска. Я не мог поверить, что это так просто и так глупо. Китайцы поставили датчик с поворотом на 90 градусов. Я спросил на форуме у такого же как я покупателя таких же энкодеров как у него стоит датчик. И у него все было также неправильно и не работало.
Почесав в затылке я решил попробовать это дело исправить. Энкодер разобрался легко, при помощи фена расплавил термоклей и достал внутренности.

Поднес датчик к диску так чтобы сенсоры был поперек рисок. Конечно датчик корректно не встал, но на осциллографе начал появляться какой-то осмысленный сигнал.


На фото видно, что сенсоры стали перпендикулярно радиусу диска.
Собрал, подключил к сервоконтроллеру и… Бинго, все заработало! Мотор встал в режим удержания позиции. Т.е. при попытке проворота вала двигателя, мотор упирается и если его все же провернуть, то возвращается в исходное положение.

Как резюме. Энкодер из коробки не работает. К покупке не рекомендую. Но в своей ценовой категории, если он был бы исправным, это хорошее бюджетное решение. Либо если переделка изделия в работающее не пугает, то можно брать и переделывать.
У продавца куча положительных отзывов на такой энкодер. Либо это все липа, либо, что вероятнее, брак пошел массово совсем недавно.
Я написал продавцу, он пока шлет мне тонну технических описаний и предлагает попробовать еще, и намекает, что это я не разобрался. Буду на него давить. Пусть хоть часть денег вернет. Я столько времени угрохал из-за их заводского разгильдяйства.
Всем добра и удовольствия от хобби!
Планирую купить +17 Добавить в избранное Обзор понравился +120 +226